
Polarith AI



1.8
RadiusSteeringBehaviour is is a derived type of the SteeringBehaviour and the direct base class for many of the inbuilt steering behaviours, like Seek, Pursue and PlanarAvoid. Hence, these kind of behaviours share basic functionality and properties.
The main idea of the RadiusSteeringBehaviour is that every percept must be in between an OuterRadius and an InnerRadius to be relevant. Thus, only relevant percepts will be processed and the other percepts will be rejected before performing more complex computations. The second important concept is the RadiusMapping which utilizes mapping types. The position inside the circular area (see Figure 1 below) determines the relevance of the object. In other words, the distance in between the two circles is mapped to a range of [0, 1]. This value is then used as basis for the computation of the ResultMagnitude.
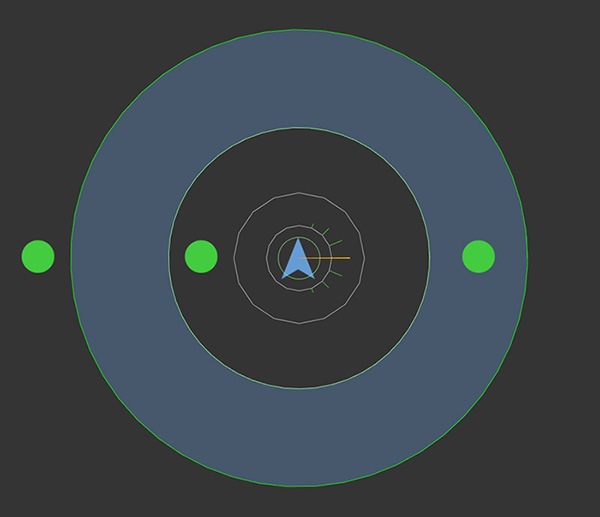
Figure 1: Every object in the blue colored area defined by the two green radii is relevant for this radius steering behaviour (Seek). Every object which lies outside is ignored.
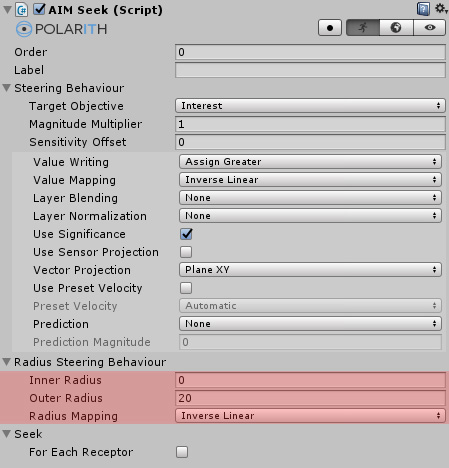
Besides the properties of SteeringBehaviour, the following set of properties is inherited by all derived RadiusSteeringBehaviour components.
| Property | Description |
|---|---|
InnerRadiusGizmo and OuterRadiusGizmo | When activated, a circle gizmo is drawn which represents a corresponding inner or outer radius (like in Figure 1 above). |
RadiusMapping | If a percept is in between the OuterRadius and the InnerRadius, its distance to the agent is mapped accordingly to this mapping. |
InnerRadius | Defines the radius which is closer to the agent. Percepts which are even closer are ignored. |
OuterRadius | Specifies the radius which is further away from the agent. All percepts which have a distance greater than this radius are ignored. |
The filtering for distance based relevance can prevent a lot of unnecessary steering operations which are very expensive for context steering compared to classic steering. When configuring your radii, always keep in mind that a very large (outer) radius may have an impact on your performance. In addition, it is always better to use environments instead of game object lists to filter what an agent perceives, especially if there are more agents which should perceive the same things. See this page for further information concerning performance.
If you wonder why the circles are off the center, they are displayed at the agent's predicted position. As against, if the prediction is disabled, the circles are drawn around the pivot of your agent.