
Polarith AI



1.8
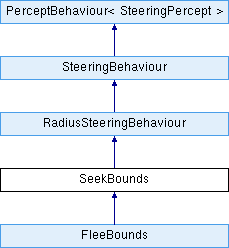
SeekBounds uses the bounding box of each percept as a possible target (back-end class).
Extending the RadiusSteeringBehaviour, this class implements a similar behaviour as Seek. The main difference being that this behaviour considers the bounding box information of the current percept. SeekBounds writes high magnitude values for receptors facing directly towards the bounding box of the percept.
Back-end class of AIMSeekBounds. This behaviour is thread-safe.
Public Fields | |
| BoundsType | BoundsType = BoundsType.ColliderOBB |
| Determines which bounding box model is used for this behaviour. More... | |
| float | InnerRadius = 0.0f |
| The minimum radius for considering percepts. More... | |
| float | OuterRadius = 20f |
| The maximum radius for considering percepts. More... | |
| MappingType | RadiusMapping = MappingType.InverseLinear |
| Determines how the startMagnitude is mapped according to the InnerRadius and OuterRadius. More... | |
| Vector3 | ResultDirection |
| The direction vector used for obtaining objective values. More... | |
| float | ResultMagnitude |
| The magnitude value used for obtaining objective values. More... | |
| int | TargetObjective |
| Defines the objective for writing values. More... | |
| float | MagnitudeMultiplier = 1f |
| Is multiplied to the ResultMagnitude in order to weight between different behaviours. More... | |
| float | SensitivityOffset |
| Is added to the Structure.Sensitivity as threshold for writing objective values. More... | |
| ValueWritingType | ValueWriting = ValueWritingType.AssignGreater |
| Sets the type for writing objective values. More... | |
| LayerBlendingType | LayerBlending = LayerBlendingType.None |
| Sets the operation for blending the behaviour results into the context. More... | |
| LayerNormalizationType | LayerNormalization = LayerNormalizationType.None |
| Sets the method for normalizing intermediate objective values while they are blended into the context. More... | |
| MappingType | ValueMapping = MappingType.InverseLinear |
| Sets the mapping type for obtaining objective values. More... | |
| bool | UseSignificance = true |
| Determines if the SteeringPercept.Significance (if there is a AIMSteeringTag) is multiplied to the ResultMagnitude in order to weight between different percepts. More... | |
| bool | UseSensorProjection = true |
If true, Sensor.ProjectionMode is used as VectorProjection. More... | |
| VectorProjectionType | VectorProjection = VectorProjectionType.None |
| Sets the type for projecting the perceived vector data into a plane. More... | |
| PresetVelocityType | PresetVelocity = PresetVelocityType.None |
| If the value is anything other than PresetVelocityType.None, a game object's rotation and default forward direction is used to approximate its actual velocity. More... | |
| PredictionType | Prediction = PredictionType.None |
| If set to anything other than PredictionType.None, the position of the Self percept is updated according to the given velocity. More... | |
| float | PredictionMagnitude = 0.0f |
| Scales the velocity vector used for predicting the possible future position of an agent if Prediction is set to PredictionType.PredictionMagnitude. More... | |
| readonly IList< T > | Percepts |
| All percepts which are relevant for an agent. More... | |
Protected Fields | |
| float | invertFactor = 1.0f |
| Is applied to both the RadiusSteeringBehaviour.startDirection and the direction of the current receptor. More... | |
| Vector3 | startDirection |
| Direction from the self position to the percept position (including distance magnitude). More... | |
| float | startMagnitude |
| Magnitude obtained from mapping the percept position relative to InnerRadius and OuterRadius. More... | |
| float | sqrInnerRadius |
| Squared InnerRadius. More... | |
| float | sqrOuterRadius |
| Squared OuterRadius. More... | |
| readonly SteeringPercept | self = new SteeringPercept() |
| The data of the associated agent itself (read only). More... | |
| readonly SteeringPercept | percept = new SteeringPercept() |
| The data of the currently processed percept (read only). More... | |
| IList< float > | objective |
| Quick access to the currently processed objective. More... | |
| ISensor< Structure > | sensor |
| Quick access to the currently processed sensor. More... | |
| IReceptor< Structure > | receptor |
| Quick access to the currently processed receptor. More... | |
| Structure | structure |
| Quick access to the currently processed structure. More... | |
| Vector3 | velocity = Vector3.forward |
| The forward direction the agent moves towards and/or looks at by default. More... | |
Properties | |
| override bool | forEachPercept [get] |
| Determines if SteeringBehaviour.PerceptSteering is called within SteeringBehaviour.Behave (read only). More... | |
| override bool | forEachReceptor [get] |
| Determines if SteeringBehaviour.ReceptorSteering is called within SteeringBehaviour.Behave (read only). More... | |
| override SteeringPercept | Self [get, set] |
| The data of the associated agent itself. More... | |
Public Methods | |
| override void | Behave () |
| This method executes the main context steering algorithm and is called within Context.Evaluate in order to set/modify objective values for the associated Context.Problem. More... | |
Protected Methods | |
| override bool | StartSteering () |
| Checks if the distance from the agent to the percept is in between the specified radii (see RadiusSteeringBehaviour.InnerRadius and RadiusSteeringBehaviour.InnerRadius). More... | |
| virtual void | PerceptSteering () |
| This method gets called once for each processed percept. More... | |
| virtual void | ReceptorSteering () |
| This method gets called for each active shape receptor for each processed percept. More... | |