
Polarith AI



1.8
Obsolete, use Avoid instead!
front-end / back-end: AIMPlanarAvoid | PlanarAvoid
inherits from: AIMRadiusSteeringBehaviour | RadiusSteeringBehaviour
In certain situations, it might be not enough to sample potential dangers in the world, so your agent has to avoid such objects actively. Instead of writing a specific amount of danger objective values, this behaviour calculates a possible avoidance direction. Thus, it is intended to write these values into an objective representing interest. The premise of this behaviour is that the agent moves in a plane defined by Up. Hence, it can avoid left or right and so, this behaviour is a planar behaviour which requires proper projection settings for 3D scenarios.
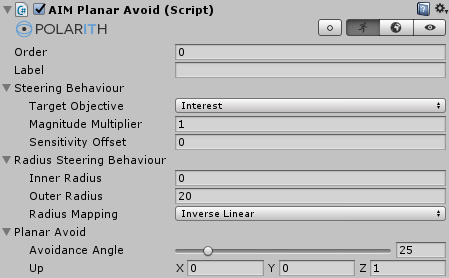
This component has got the following specific properties.
| Property | Description |
|---|---|
AvoidanceAngle | This angle defines the possible avoid direction (for both left and right) with respect to an agent's movement direction. |
Up | Needed to calculate the avoid directions. Up is the normal of the plane the agent moves in. |
This behaviour requires valid velocities. So, if an agent has no Rigidbody attached, a Steering Tag which has TrackVelocity activated needs to be present.
The effect of Planar Avoid is shown in the following figure.
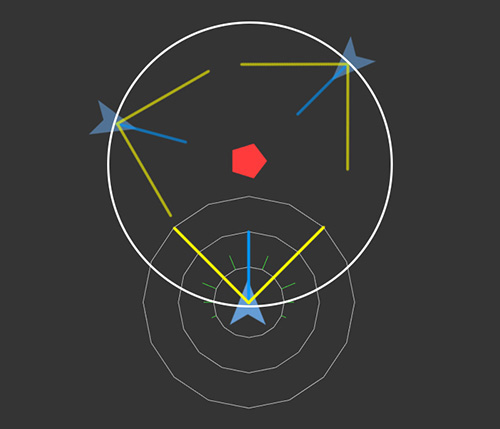
Figure 1: Shows how the Planar Avoid behaviour influences objective values. The greatest magnitudes occur along directions resulting from the given AvoidanceAngle (yellow). However, magnitudes decrease if the direction faces the obstacle. Depending on the agent's position relative to the obstacle, the optimal avoidance direction would be the tangent of the illustrated circle.
Let's have a closer look on how the AvoidanceAngle works. For example, if the direction would be (0, 0, 1), the Up vector would be (0, 1, 0) and the avoid angle would be 45°, the resulting directions would be approximately (-0.7, 0, 0.7) and (0.7, 0, 0.7). Note, this parameter is highly dependent on your controller. For a direct controller, a smaller value (~0 to ~5) might be a better choice, as against a physics-based controller normally benefits from a larger angle (~20 to ~40) in order for the applied forces to have an impact on the Rigidbody(2D).
In theory, it is possible to apply this behaviour for arbitrary agent orientations. However, this behaviour works in a planar manner which means that the obstacle should always be located in the agent's perceptional plane (defined by the Up vector). This can be ensured by using the correct projection mode: PlaneXY corresponds to Up = (0, 0, 1) and PlaneXZ corresponds to Up = (0, 1, 0).
Depending on your setup, either InverseQuadratic or InverseSquareRoot mappings might be useful instead of just using the simple InverseLinear mapping. In this way, for example, you can make your agents react early to suddenly occurring threats.